Linijos sekimo robotas „Kinietis”
Roboto kūrėjas – Deimantas Norvilis
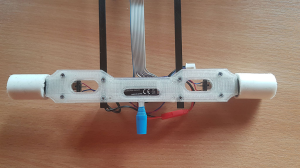
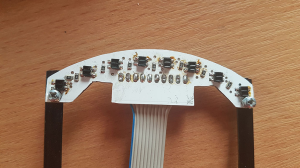
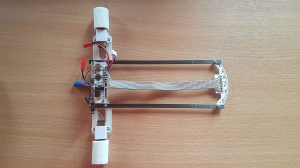
Linijos sekimo robotas. Jo dydis 22cm x 23cm. Svoris – apie 94gr. Jame naudojami pololu 10:1 n20 varikiai, nano-tech 300mAh 2 celių baterija. Robote naudojamas Arduino nano mikrovaldiklis, TB6612FNG variklių valdiklis, linijai aptikti naudojami aštuoni QRE1113GR sensoriai. Roboto pcb ir sensorių plokštelės buvo nubraižytos naudojant Eagle programą užsakyta iš jlcpcb.com.
Roboto programa parašyta naudojant Arduino IDE aplinką, programoje naudojamas PID algoritmas tikslesniam linijos sekimui. Ratlankiu laikikliai atspausdinti 3D spausdintuvu iš PLA plastiko ,o variklio laikikliai buvo pirkti iš Pololu.com Ratlankiai aplieti silikonu iš silikon.lt.

Pastebėjimai darant šį robotą:
- Sunkiausia buvo susilituoti pagrindinę plokštelę. (Ją belituodamas sugadinau tris tokias plokšteles)
- Tik savo mokytojo dėka supratau kaip naudoti PID algoritmus.
- Kodėl pavadinimas „KINIETIS“? Todėl, nes dauguma detalių pagaminta Kinijoje. 😊
- Pradžioje buvau padaręs programavimą naudojant bluetooth modulį (HC-05), bet man šis metodas nepasiteisino.